|
-
ŷ˼��R8-32���������״�ɨ��ϵͳ
��ϸ��Ϣ| ѯ������Ʒ����ŷ˼�� �ͺ���R8-32 ����������ʽ ɨ�跽ʽ����תʽɨ�� ��ѧ�ֱ�����ÿ��ͼ��3840x2746���� ɨ���ٶ���64��� S ���������������� ɨ�������360�� ɨ���Դ��32�� 1.�����ݲɼ�ǰ֧������ÿһ֡��*С������������ɨ���*����롢*С���룬Ҳ��������������ݵĺ����ƺ̶�����������
2.�ɼ���Ŀ�����������֧���ֻ����ƶ���ʵʱͬ����ʾ��֧��������ʾÿ��������֡����ÿ��������״̬���ɼ�ʱ�������״̬�ͱջ�������ɨ����ɼ��ɵ���ʵʱ�������ݺ��˶��켣��
3.���Ծ��ȣ�≤5cm,��Ծ��ȣ�≤3cm�����Ƹ�ʽ ��Las,ply,LiData���洢��≥512G���ٴ洢����
4.�����״ᆱ�ȣ�±1cm���ز�������≥2��ɨ��Ƶ��(���ز�)��≥62���/�룻�ӳ��ǣ�ˮƽ��360°��
5.��ࣺ≥110m��������≤9kg����ع���ʱ����≥2h��
6.����ȫ������ֱ��ʣ�≥3840*1920��
7.�豸�����븽��
��1������ʽ�����״�1̨
��2�����ݷ�������2��
��3����վ1��
��4����̬Ӳ��≥2T
��5������վ1�ף�������x86 �ܹ� CPU����Ƶ≥3.2GMHz������������≥20���ģ��ڴ�≥128GB����̬Ӳ������≥2T���Դ�≥24GB��FT32����≥48.6 TFLOPS��≥3��DP�ӿڣ�≥1��HDMI�ӿڡ�
��6�����������״���2��
8.������
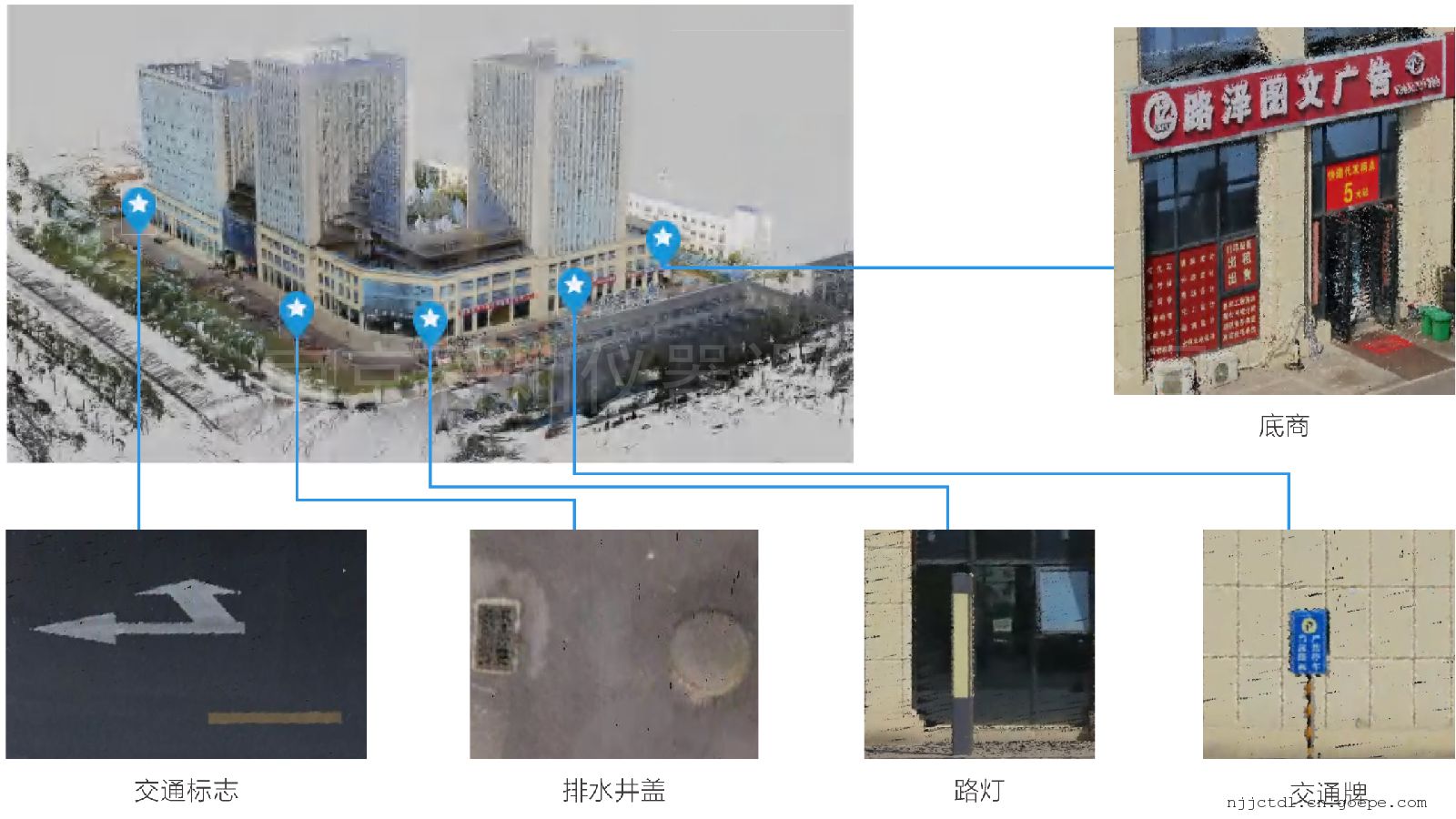
��1����������Ԥ��������֧�����þ����˲���ƽ���˲����˲���������֤���������������������Ԥ����������ɫ֧�־��븳ɫ��ʱ�丳ɫ
��2����������Ԥ��������֧����ɢ�����������ֲ����Եȴ��������ʾ��������ں�ǿ����ʾ��
��3����������Ԥ��������֧�ֻ���AI�����ѧϰ����
��4����������Ԥ���������ڽ���ʱ֧��ÿ֡*С������*С��*��ɨ���������á���������Ԥ��������֧�ֹ켣ͼ�鿴
��5���������ݺ�������֧�ֵ��ơ�����ģ����ͬһ���ڽ�����ʾ������
��6���ṩ�߱���������Ȩ��֤�����ϡ�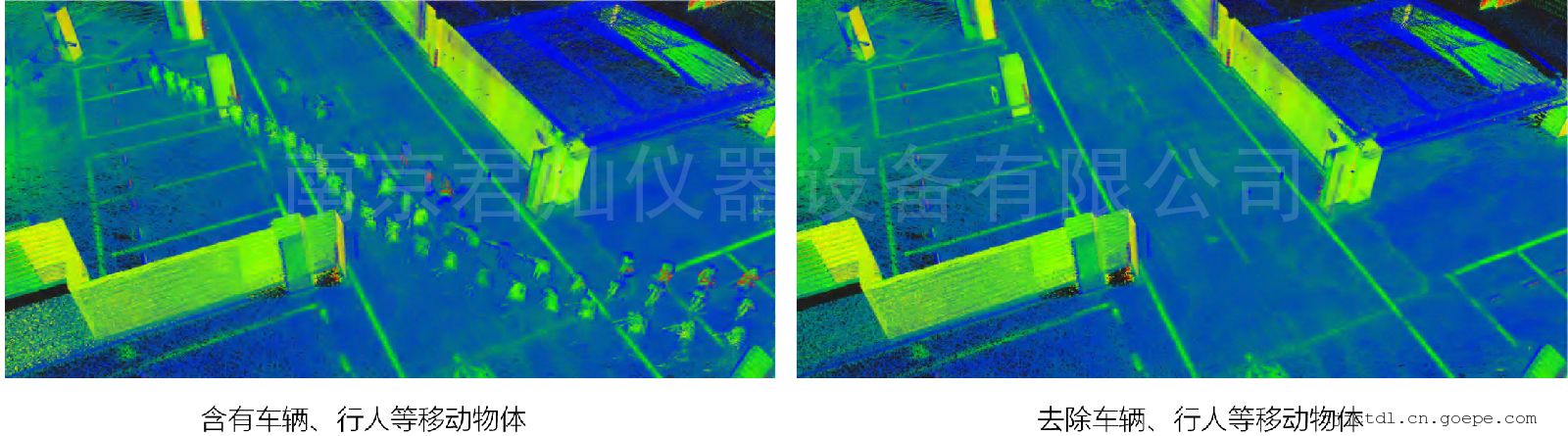
-


-
��Ʒ����
-
��Ʒ����
-
RTK����ϵͳ
-
ȫվ��
-
���
-
ˮ��
-
���ⴹ��
-
���������/ˮƽ��
-
��ѧƽ���ǣ���ѧר�ã�
-
�ֳ�GPS/GIS���ݲɼ���
-
��������/�����
-
�����̱����ն�
-
��ά����ɨ����
-
���˻���б��Ӱϵͳ
-
��Яʽ������
-
�״�������
-
�״�ˮλ��
-
�ֳ�ˮλ��
-
�ֳ�����վ
-
�״�������
-
������������
-
������������
-
���¹���̽����
-
����������
-
�����۽ӻ�
-
���������DZ�
-
�Խ���/���ǵ绰
-
����������/ɭ��������
-
��Զ��/ҹ����/������
-
���ֲ����������
-
RTK���ޡ�ȫվ������
-
ȫվ�Dz��������˼�����
-
��·��������Ѳ��ϵͳ
-
ˮ�µ��β�����˴�
-
��ϵ��ʽ
- ��ϵ�ˣ��Ƶ���
- �硡����025-83765280
- �֡�����15722921040
- �����棺025-83767678
- �ʡ��䣺1287850950@qq.com
- �ʡ��ࣺ210000
- �ء�ַ����¥������·98�Ž��ŵ��γ�F551��
- ����ַ�� https://njjctdl.cn.goepe.com/
http://www.juncan17.com